Оборудование для реабилитации. Роботы для реабилитации инвалидов Робототехническая медицинская реабилитационная техника pdf
Обзор состояния робототехники в восстановительной медицине
1. Классификация медицинских роботов
Чтобы систематизировать известные и возможные робототехнические системы (РТС) в медицине предложен ряд классификаций . В качестве признаков классификации использованы следующие: инвазивность процедуры, безопасность, мобильность, эргономичность, контроль как управление или диагностика. Один из вариантов классификации, учитывающий последние достижения в медицинской робототехнике приведен на рис.1 . Основные три класса – это роботы для восстановительной медицины, роботы для жизнеобеспечения и роботы для хирургии, терапии и диагностики. Они представляют собой основные области медицинской робототехники, хотя эти классы и их подклассы не являются независимыми по указанным выше признакам. Далее в разделах 3 – 5 рассматриваются представители обозначенных в классификации подклассов восстановительной медицины.
Рис.1
2. Концепция разработки и внедрения роботов в восстановительной медицине для здоровых людей
Восстановительная медицина представляет систему медицинской деятельности, направленной на диагностику функциональных резервов, сохранение и восстановление здоровья человека посредством оздоровления и медицинской реабилитации. Под оздоровлением следует понимать комплекс профилактических мероприятий, направленных на восстановление сниженных функциональных резервов и адаптивных возможностей организма у практически здоровых лиц . Особенную роль профилактической медицины отмечал Нобелевский лауреат И.П. Павлов (рис.2). По его словам: “Профилактическая медицина достигает своих социальных целей только в случае перехода от медицины патологии к медицине здоровья здоровых”.

Рис.2
Понятие восстановительная медицина отличается по существу от понятия медицинская реабилитация, которая представляет комплекс диагностических и лечебно-профилактических мероприятий, направленных на восстановление или компенсацию нарушенных функций организма человека и трудоспособности у больных лиц и инвалидов.
Реабилитация – это закрепление лечебного эффекта в процессе выздоровления больного после болезни. В отличие от реабилитации, обеспечивающей восстановление здоровья у больного человека, восстановительная медицина направлена на воспроизводство утраченных резервов здоровья. Лечебно-оздоровительный арсенал восстановительной медицины обеспечивает человеку социально-творческую активность в своей профессии, то есть работоспособность в тех условиях, в которых протекает его профессиональная деятельность. Реабилитация по преимуществу сосредоточена на органной патологии, и соответственно её критериальный аппарат оценивает степень возвращения к норме. Методический инструментарий восстановительной медицины перенацеливается с поиска симптомов болезни на оценку резервных функциональных возможностей организма, именно к тем нагрузкам, условиям труда, в которых работает человек.
В основу концепции развития здравоохранения и медицинской науки в Российской Федерации на период до 2010 г. положена здоровьецентрическая модель системы здравоохранения, разработанная РНЦВМиК под руководством академика А.Н.Разумова (рис.3). Суть модели состоит в акценте на сохранение здоровья здорового человека а, следовательно, на восстановительную медицину .
Рис.3
В дальнейшем большинство исследований этой монографии будет связано с контингентом не только травмированных в военных действиях, на производстве, в спорте людей, больных детским церебральным параличом, постинсультных больных, но и людей здоровых, устающих от физической и умственной деятельности, снижающих свою работоспособность. Например, преподаватели и студенты университетов. Уместно сказать здесь о развивающейся в настоящее время системе интенсивного информатизированного обучения, которая для повышения эффективности обучения предполагает концентрацию усилий как обучающихся, так и преподавателей без ущерба их здоровья. Для них необходимой является рассматриваемая в монографии восстановительная медицина.
Восстановительная медицина включает ряд терапий, в том числе, немедикоментозные, одним из видов которых является механотерапия. Среди множества известных средств механотерапии наибольшими возможностями обладает робототехника.
О необходимости применения аппаратных средств оздоровительного массажа именно для здоровых людей писал в своей диссертации “Материалы к вопросу о действии массажа на здоровых людей” в 1882 г русский учёный Н.В. Заблудовский (рис.4). “Нельзя ли воспользоваться усовершенствованиями механики для устройства таких машин, которые заменили бы действия рук, или не будет ли даже действие машин предпочтительнее действия рук? Стоило бы изобрести машину, силу которой можно было бы в каждый момент определять в цифрах и вместо работы массёра, зависящей от субъективного мышечного чувства, иметь дело с работой, выраженной в цифрах. Другими словами – вместо того, чтобы количество целебного средства взять на глазок, взвешивать его на точных весах”.

Рис.4
В те времена это было фантастикой, и учёный лишь мечтал о возможности дозирования воздействий на аппаратных средствах будущего. В настоящее время мечты великого предсказателя могут быть реализованы при обращении к развитой адаптивной интеллектуальной робототехнике. Проблема для медицины, в первую очередь, состоит в развитии концепции Н.В. Заблудовского о новом подходе к физической культуре человека с участием не только волевых и пассивных движений, но и массажа. Массаж может иметь как функцию релаксации, так и мобилизации. В оптимальном объединении этих функций физическая культура сможет в большей степени способствовать сохранению и повышению запасов здоровья и повышению работоспособности в физическом и умственном труде.
Поэтому существом концепции разработки и внедрения роботов в ВМ для здоровых людей является использование адаптивных и интеллектуальных роботов в сочетании с другими видами терапий: аромо-, мело-, психотерапией для сохранения повышения запасов здоровья людей, повышения их работоспособности.
Конечно, робототехническая система является автоматизированным средством, лишь временно работая автоматически, подчиняясь человеку на уровне принятия сложных решений и являясь разумным, а не только физическим помощником.
В соответствии с классификацией, предложенной выше, проведен обзор состояния робототехники для восстановительной медицины по трём направлениям: манипуляции на суставах или движения конечностей в суставах; манипуляции на мягких тканях, т.е. разнообразный массаж; активные и биоуправляемые протезы.
3. Роботы для выполнения движений конечностей в суставах
Движения конечностей в суставах руками врача широко используются в спортивной, восстановительной медицине, в лечении и обучении пациентов с последствиями инсульта, детского церебрального паралича. Пассивные и активные движения конечностей в суставах часто выполняются вместе с массажем, в том числе, и в оздоровительных целях. Механотерапия заменяет руки врача руками манипулятора. Одни из первых работ, в которых был предложен манипуляционный шестиприводной робот для массажа и движения конечностей в суставах появились в 1997г. . Позднее появляются одноприводные роботы американской фирмы ”Biodex ”, швейцарской фирмы “Con -Trex ”и четырёхприводной робот швейцарской фирмы “Lokomat ” .
Робот швейцарской фирмы “Lokomat” является наиболее ярким представителем подкласса реабилитационных роботов для выполнения движений конечностей в бедренных, коленных и голеностопных суставах. Существует концепция нейропластичности, которая предполагает "постановку задачи специфического обучения" и заключается в том, что с помощью многократно повторяющихся тренировок можно улучшить повседневную двигательную активность у пациентов с неврологическими нарушениями. Роботизированная терапия на комплексе Lokomat отвечает вышеописанным требованиям и дает возможность проведения интенсивной локомоторной терапии с обратной связью. Общий вид комплекса представлен на рис. 5.

Рис. 5
Lokomat состоит из четырёх приводов для навязывания движений ходьбы и системы разгрузки веса пациента и беговой дорожки.
Пациенты,
находящиеся в инвалидном кресле, могут
быть без особого
труда переведены на
полотно беговой дорожки и закреплены
с помощью специальных фиксаторов.
Управляемые компьютером приводы
синхронизированы со скоростью беговой
дорожки. Они задают ногам пациента
траекторию движения, которая формирует
ходьбу, близкую к естественной.
Усиленная мотивация пациента осуществляется за счет управления нагрузкой с помощью биологической обратной связи при выводе текущего состояния на монитор (рис. 6).

Рис. 6
Для задач ортопедии (взрослая и детская), спортивной медицины, производственной реабилитации, профилактики и лечения остеоартритов известен робот американской фирмы “Biodex ”. Принцип действия основан на электронной динамометрии. Система обеспечивает быструю и точную диагностику, лечение и документирование нарушений, являющихся причиной функциональных расстройств мышц и суставов. Система позволяет проводить мобилизацию суставов в направлении сгибание / разгибание, отведение / приведение и ротация, что необходимо для полноценного восстановления их утраченных функций.
В комплектацию входит набор приспособлений для работы с тазобедренным, коленным, плечевым и локтевым суставами, а также с голеностопом и запястьем. Общий вид системы, работающей с верхними и нижними конечностями, представлен на рис. 7.

Рис. 7
Роботы для восстановления верхних и нижних конечностей были представлены на симпозиуме по медицинской робототехнике в Пенсильвании . На рис.8 слева: манипулятор GENTLE /s , разработка University of Reading , Великобритания; в центре: манипулятор ARMguide , разработка Rehabilitation Institute of Chicago ; справа: манипулятор Manipulandum , разработка Rehabilitation Institute of Chicago .

Рис.8 Манипуляторы для восстановления верхних конечностей
На рис.9 вверху слева: робот AutoAmbulator , разработка HealthSouth , США; вверху справа: тренажёр для ходьбы, разработка University of California , США); внизу слева: робот GaitMaster 2, разработка University of Tsukuba , Япония); внизу справа: робот для движений конечностей, а также для массажа, разработка Российской Академии Наук) подробно описанная ниже.

Рис.9 Роботы для восстановления суставов нижних конечностей
Воздействия с помощью рассмотренных выше роботов относят к механотерапии. Механотерапия - метод лечебной физкультуры, основанный на выполнении дозированных движений (преимущественно для отдельных сегментов конечностей), выполняемых с помощью специальных приспособлений. Механотерапия применяется в качестве восстановительного лечения при различных двигательных расстройствах, когда необходимо увеличить амплитуду движений в суставах и силу определенных мышечных групп. На некоторых аппаратах можно заниматься сразу после оперативного вмешательства. Выбор движений, выполняемых на механотерапевтических аппаратах, определяется характером ограничения движений и анатомическими особенностями сустава.
Роботы для выполнения манипуляций на мягких тканях (роботы для массажа)
История появления роботов в ВМ для массажа такова. В 1997 г. на втором форуме IARP по медицинской робототехнике была представлена только одна работа с использованием робототехники для восстановительной медицины – робот для массажа . В 2002 г. на сайте голландской фирмы появился робот для массажа Tickle - щекочущая букашка. В 2003 г. появился российский патент – робот для шлейф-массажа . В 2005 г. на сайте Силиконовой долины появилось сообщение об использовании робота Puma для массажа. За основу этого робота была взята идея, изложенная в российской работе . К сожалению, развитие этой разработки неизвестно. Перечисленные выше работы представляют большинство известных роботов для массажа, если не иметь ввиду многочисленных аппаратных средства для массажа.
Разнообразные аппаратные средства издавна применяются для облегчения труда массажиста, предупреждения профессиональных заболеваний кистей его рук. Простейшие из них: вибраторы, роллеры, насадки для акупунктуры и акупрессуры представляют средства механизации, которые перемещает массажист (рис. 10).


Рис.10. Аппаратные средства восстановительной медицины
Следует заметить, что робот может быть носителем упомянутых аппаратных средств.
Более сложными являются средства автоматизации, например, массажные кресла. Массажные кресла (рис.11) в качестве актуаторов имеют воздушные подушки с регулируемым давлением, ролики с управляемыми усилиями прижатия. Зоны воздействия массажа: шейно-плечевой отдел, спина, поясничный отдел, ягодицы, бёдра, голени, ступни. Виды массажа: разминающий, похлопывающий, поколачивающий, вибрационный, Шиатсу. С пульта управления можно установить желаемый уровень интенсивности массажа.

Рис.11
Пользуются популярностью полуавтоматические аппаратные средства массажа, частично разгружающие массажиста. На рис.12 показана рука производства американской фирмы Meilis, помогающая выполнять прижимные приёмы.
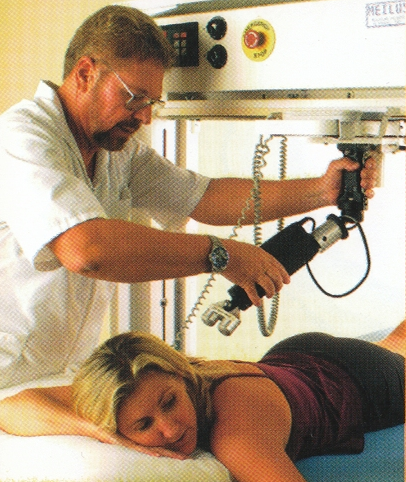
Рис.12
Робот голландской фирмы Tickle весьма прост по конструкции (рис. 13). В металлическом корпусе находятся два электромотора, аккумуляторная батарея и четыре датчика, позволяющих следить за наклоном поверхности, по которой передвигается робот-массажист. Движение осуществляется с помощью двух силиконовых "гусениц", покрытых выступами, создающими массажный эффект. Принцип движения робота напоминает принцип движения танка: каждый из моторов приводит в движение свою гусеницу. Воздействия робота – поглаживающие и щекочушие, вызывающие эффект релаксации.

Рис.13
Робот для шлейф-массажа выполняет плоскостное, непрерывное, прямолинейное поглаживание на больших поверхностях тела (спина, грудь, живот, конечности). Такого рода поверхностное поглаживание отличается особо нежными и легкими движениями, оказывающими успокоительное воздействие на нервную систему, вызывает мышечное расслабление и улучшение кровообращения. Конструкция робота представляет каретку с электродвигателем, перемещающеюся по траверсе вдоль тела пациента (рис.14). Траверса профилирована по рельефу задней поверхности номинального пациента и не может быть перепрограммирована. С каретки свешиваются поглаживающие щётки и прижимаются к пациенту упругими пластинками.

Рис.14
В 2007 году в Японии разработан
робот для массажа лица WAO-1 (Waseda Asahi Oral
Rehabilitation Robot 1). Робот (рис.15) оснащен двумя
50-сантиметровыми механическими руками,
которые массируют лицо пациента с обеих
сторон. Безопасность обеспечивается
силометрической ограничительной
системой, которая раздвигает руки робота
в стороны, стоит ему только приложить
слишком большое усилие.
Лицевой
массаж признан весьма эффективным
средством борьбы с сухостью во рту,
поскольку стимулирует дополнительное
слюноотделение, а также помогает
исправить нарушения ротовой структуры.

Рис. 15
Эффективность аппаратных средств массажа определяется адекватностью механического контакта с пациентом. Этот контакт осуществляется через инструмент аппаратного средства. Поэтому в техниках, воспроизводящих руки человека, инструмент должен имитировать контактные свойства человеческой руки: упругость, теплоту, влажность, фрикционные свойства (шероховатость, гладкость, скользкость), координационные возможности (многопальцевость, способность захватывать). В большей степени перечисленные свойства может обеспечить многосуставный манипуляционный робот.
В Московском Государственном Индустриальном Университете разработан робот для выполнения приёмов массажа и движения конечностей в суставах . Основой этого робота является промышленный робот РМ-01, манипуляционная рука которого антропоморфна по размерам и кинематике (рис.16). В контакте с телом робот развивает усилие до 60 Н. Необходимые усилия развиваются и контролируется за счёт позиционно – силовой системы управления, расширяющей возможности штатного робота.

Рис.16
Шестиприводной робот с указанными данными может выполнять множество известных манипуляций непосредственно на мягких тканях, т.е. разнообразный массаж, а также манипуляции на суставах в виде пассивных и активных движений конечностей, постизометрической релаксации в виде сочетаний нагружений и разгрузок мышц конечностей. На рис.17 робот выполняет выжимание длинных мышц спины девочки.
Рис.17
Активные биоуправляемые протезы верхних и нижних конечностей
Биопротезирование верхних и нижних конечностей, утраченных в результате травм или болезни опирается на более простые решения. Некоторые простейшие решения в какой-то степени лишь эстетически восстанавливают внешность конечностей, другие решения восстанавливают некоторые функции. На рис.18 приведена классификация протезов, в которой выделены классы активных и биоуправляемых протезов.
Рис.18
Разработанные на основе теории баллистических синергий , протезы нижних конечностей не являются активными и не используют биосигналы, но эффективно используют упругость пружин протезов.
В тяговых протезах верхних конечностей, вначале как пассивных, движения схвата кисти вызывались за счёт дополнительных движений сохранившейся части руки или за счёт движения туловища. Передающим звеном вначале были гибкие тяги, впоследствии появились активные тяговые протезы, в которых движения тяг воспроизводились встроенными двигателями.
Активными, но не биоуправляемыми, являются миотонические протезы, в которых управляющими сигналами являются усилия инвалида. Датчики в виде микровыключателей или тензоэлементов измеряют эти усилия и передают на исполнительные приводы кисти.
Рассмотренные способы протезирования без использования биосигналов имеют ряд недостатков. Управляющие тяги обременяют инвалида, затрудняют движения плечевого пояса, число управляющих команд так же, как при миотоническом управлении, ограничено (одна-две команды). Помехами для управления являются случайные внешние толчки в гильзу культи протеза. Тем не менее, простейшие протезы разработаны в виде модульных конструкций и выпускаются серийно .
Развитию биоуправляемых протезов способствовали достижения в области электрофизиологии, биомеханики, микроэлектроники, адаптивных систем управления с обратными связями.
В настоящее время известна немецкая фирма “Otto Bock ”, серийно выпускающая пассивные и активные протезы. На рис.19 приведен активный протез коленного сустава.

Рис.19
Наиболее значительные результаты по биопротезированию в 70-80-х годах в России известны по работам ЦНИИ ПП . В работах ЦНИИПП родилось принципиально новое направление в протезировании конечностей - создание протезов с биоэлект-рической системой управления или биоуправляемых протезов. Сущность нового принципа построения искусственных конеч-ностей состоит в том, что управление внешними источниками энергии, за счет которой работает протез, в своей основе по-добно естественной координации движений здорового человека.
В живом организме управляющие воздействия передаются мышцам посредством биоэлектрических импульсов, отража-ющих команды центральной нервной системы. Подобно этому в протезе руки с биоэлектрическим управлением роль команд-ных сигналов выполняют биотоки, отводимые от усеченных мышц культи. Механизмом, исполняющим команды, является искусственная кисть, снабженная малогабаритным электри-ческим приводом с автономным питанием.
По материалам симпозиума 2004 г. в Пенсильвании известны активные протезы и экзоскелетоны, приведенные на рис.20.

Рис.20 Активные протезы и экзоскелетоны
Одними из первых работ в области активных протезов и экзоскелетонов являются работы Миомира Вукобратовича . Под его руководством были разработаны экзоскелетоны, в одном варианте с электрическими, в другом с пневматическими приводами тазобедренного, коленного и голеностопного суставов для обеих ног пациента (рис.21). Экзоскелетон предназначался для усиления дистрофически слабых мышц нижних конечностей человека во время ходьбы.

Рис.21
Японская компания Matsushita разработала роботизированный костюм, который поможет реабилитации частично парализованных людей (рис.22). Когда человек, страдающий параличом на одну руку, делает движение здоровой рукой, парализованная рука делает то же самое движение, напрягая и сгибая компрессоры, которые играют роль мускулатуры. Повторяя движения здоровой руки, человек в роботизированном костюме может тренировать свою больную руку до восстановления нормального функционирования конечности.

Рис.22
Костюм весит 1,8 кг. Он был разработан совместно компанией
Были проведены испытания костюма в госпитале, и планируется поставить производство на коммерческую основу. Приблизительная цена костюма для использования в реабилитационных клиниках составит 17000 долл., для домашнего использования – около 2000 долл.
Другая токийская компания
Cyberdine разработала автоматизированный
костюм HAL
(Hybrid Assistive Limb) (рис. 23), который помогает
пожилым людям и людям с ограниченными
способностями ходить. Устройство с
датчиками будет доступно в Японии за
арендную плату, составляющую 2200$ в месяц.
22-фунтовая компьютерная система,
работающая от батареи, крепится к талии.
Она управляет приводами на скобах,
которые крепятся ремнями к бедрам и
коленям, и обеспечивают автоматизированную
помощь во время ходьбы.

Рис.23
Выводы
1. Судя по публикациям организаций- разработчиков и медицинских центров области применения медицинских роботов, в том числе для восстановительной медицины, расширяются и спрос на них увеличивается.
2. Медицинские роботы в сравнении другими аппаратными средствами имеют ряд преимуществ. Это – быстрая перепрограммируемость, высокая точность повторения движений, неутомимость, отсутствие субъективных факторов (добросовесность), дружественный интерфейс (психоэмоциональный контакт), партнёрство (для детей вовлечение в игры, в разнообразные движения, например, в утреннюю зарядку). Также адаптация к индивидуальным особенностям человека (позиционно-силовое управление), наличие интеллекта (накопление опыта, анализ, генерация программ), повышенная безопасность за счёт адаптации и интеллекта.
3. В сравнении с руками врача медицинские роботы сегодняшнего дня часто уступают в чувствительности и координации в сложных движениях.
4. Концепция разработки и внедрения роботов в ВМ для здоровых людей состоит в применении адаптивных и интеллектуальных роботов для сохранения и увеличения запасов здоровья населения, восстановлении работоспособности трудящихся.
5. При разработке и внедрении роботов в ВМ следует делать компромиссный выбор между многофункциональными роботами и экономичными специализированными с малым числом приводов.
6. Для разработанных аппаратных средств ВМ, включая роботы, манипулирующие на мягких тканях и суставах, активные и биоуправляемые протезы, эффективно используется тактильная и силометрическая информация, как для разомкнутых, так и для замкнутых силовых и позиционно-силовых систем управления.
7.Биоинформация используется непосредственно как управляющие сигналы, образует замкнутые системы или образует биологические обратные связи через зрение и нервную систему человека.
Список литературы
Головин В.Ф. Проблемы развития робототехники в восстановительной медицине. Труды конференции “Мехатроника”, СПб., 2008
Саврасов Г.В. Медицинская робототехника: состояние, проблемы и общие принципы проектирования. // Вестник МГТУ им. Баумана Н.Э. Спецвыпуск «Биомедицинская техника и технология, серия «Приборостроение», 1998
Разумов А.Н., Головин В.Ф. Массаж как культура повседневной жизни здоровых людей, Вестник оздоровительной медицины, М.: 2010, №6
Разумов А.Н., Здоровье здорового человека. - М. “Медицина”, 2007
Разумов А.Н., Пономаренко В.А., Пискунов В.А. Здоровье здорового человека. М.: Медицина, 1996
Дубровский В.И., Валеология. Здоровый образ жизни. – М.: Retorika- A, 2001.
Разумов А.Н., Покровский В.И. Здоровье здорового человека, научные основы восстановительной медицины, М.: РАМН РНЦ ВМК, 2007
Заблудовский В.И., диссертация “Материалы к вопросу о действии массажа на здоровых людей”- СПб.: 1882 г
Golovin V.F. Robot for massage. Proceedings of JARP 2nd Workshop on Medical Robotics Heidelberg, Germany, 1997
Biodex system 3. Manual, 20 Ramsay Road, Shirley, New York 11967-4704
Ковражкина Е.А., Румянцева Н.А., Старицын А.Н., Суворов А.Ю., Иванова Г.Е., Скворцова В.И. Роботизированные механотренажеры в восстановлении функции ходьбы у больных с инсультом. // М.: Расмирби, №1 (24) 2008, с. 11-16.
Assistive technologies. Proceedings IARP, Workshop on medical robotics. Hidden Valley, Pennsylvania, USA, 2004
Rehabilitation robotics, Proceedings IARP, Workshop on medical robotics. Hidden Valley, Pennsylvania, USA, 2004
Мансуров О.И., Мансуров И.Я. Способ аппаратного поверхностного массажа и реализующий этот способ робот для шлейф-массажа. Рос.патент №2005130736/14 от 05.10.2005
Jones, Kenny C., Du, Winncy, “Development a Massage Robot for Medical Therapy,” Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM’03), July 23-26, 2003, Kobe, Japan, pp. 1096-1101
Golovin V.F., Grib A.N. Mechatronic system for manual therapy and massage. Proc. 8-th Mehatronics Forum International Conference, University of Twente, Netherlands, 2002
Golovin V.F. Robot for massage and mobilization. Proceedings of workshop of AMETMAS-NoE, Moscow, Russia, 1998
Golovin V.F., Grib A.N. Computer assisted robot for massage and mobilization. Proc. “Computer Science and Information Technologies”, Conference Greece University of Patras, 2002
Головин В.Ф., Саморуков А.Е. Способ массажа и устройство для его осуществления. Рос. патент № 2145833, 1998
Головин В.Ф. Мехатронная система для манипуляции на мягких тканях. / Мехатроника, автоматизация, управление. – М.: 2002, №7
Питкин М.Р. Биомеханика построения протезов нижних конечностей.-СПб.: Изд-во “Человек и здоровье”, 2006.-131с.
Конструкции протезно-ортопедических изделий. Под ред. Кужекина А.П. М. “Лёгкая и пищевая промышленность”, 1984
Якобсон Я. С., Морейнис И. Ш., Кужекин А.П. Конструкции протезно-ортопедических изделий /Под редакцией А.П. Кужекина. М., : Лёгкая и пищевая промышленность, 1984
Вукобратович М. Шагающие и антропоморфные механизмы. Изд.-во “Мир”, М. 1976
". Перевод на русский язык редакции сайт
2.3 Медицина и робототехника
2.3.1 Обзор области
Здравоохранение и роботы
В результате демографических изменений во многих странах системы здравоохранения сталкиваются с возрастающей нагрузкой, поскольку им приходится обслуживать стареющее население. На фоне роста спроса на услуги совершенствуются процедуры, что приводит к улучшению результатов. Одновременно растут затраты на оказание медицинских услуг, несмотря на снижение числа людей, занятых в области оказания медицинской помощи.
Применение технологий, включая робототехнику, представляется частью возможного решения. В данном документе отрасль медицины разделена на три подобласти:
- Роботы для больниц (Clinical Robotics) : Можно определить соответствующие робототехнические системы, как те, что обеспечивают процессы "заботы" и "излечения". Прежде всего - это роботы для диагностики, лечения, хирургического вмешательства и ввода медикаментов, а также в системах экстренной помощи. Такие роботы управляются персоналом больницы или обученными специалистами в области заботы о пациентах.
- Роботы для реабилитации (Rehabilitation) : Такие роботы обеспечивают послеоперационную или посттравматическую помощь, когда прямое физическое взаимодействие с робототехнической системой будет либо ускорять процессс восстановления (выздоровления), либо обеспечивать замену утраченной функциональности (например, когда речь идет о протезе ноги или руки).
- Вспомогательные роботы (Assistive robotics) : В этот сегмент относят другие аспекты робототехники, применяемой в медицинской практике, когда первичным назначением робототехнических систем является обеспечение поддержки либо тому, кто оказывает медицинскую помощь, либо непосредственно пациенту, независимо от того, идет ли речь о больнице или о другом медицинском учреждении.
Все перечисленные поддомены характеризуются тем, что требуют обеспечения системами безопасности, которые принимают в расчет клинические потребности пациентов. В типовом случае управлением или настройками таких систем занимается квалифицированный больничный персонал.
Медицинская робототехника - больше, чем просто технология
Кроме развития непосредственно робототехнических технологий, важно, чтобы соответствующие роботы внедрялись, как часть процессов лечения в больнице или других медицинских процедур. Требования к системе должны формироваться на основе четко выявленных потребностей пользователя и получателя услуг. При разработке таких систем, принципиально важно демонстрировать ту дополнительную пользу, которую они могут обеспечить при их внедрении, это критически важно для дальнейшего успеха на рынке. Получение дополнительной пользы требует прямого вовлечения в процесс разработки данной техники профессионалов в области медицины, а также пациентов, как на стадии дизайна, так и на стадии внедрения при разработке роботов. Разработка систем в контексте среды их будушего применения обеспечивает вовлечение заинтересованных сторон. Ясное понимание существующей медицинской практики, очевидная необходимость обучения медицинского персонала пользованию системой, владение различной информацией, которая может потребоваться для разработки, - критически необходимые факторы при создании пригодной к дальнейшему внедрению системы. Введение роботов в медицинскую практику потребует адаптации всей системы оказания медицинских услуг. Это деликатный процесс, в рамках которого технология и практика оказания медицинских услуг оказывают взаимное влияние и должны будут адаптироваться друг к другу. С момента начала разработки, важно принимать во внимание этот аспект "взаимозависимости".
Разработка роботов для нужд медицины включает очень широкий набор различных потенциальных приложений. Рассмотрим их ниже, в контексте выделенных ранее трех основных сегментов рынка.
Роботы для больниц
Этот сегмент представлен разнообразными приложениями. Можно выделить, например, такие категории:
Системы, которые непосредственно расширяют возможности хирурга в плане ловкости (гибкости и точности) и силы;
Системы, которые позволяют проводить дистанционную диагностику и вмешательства. В эту категорию можно включать, как телеуправляемые системы, когда врач может находиться на большем или меньшем удалении от пациента, так и системы для использования внутри тела пациента;
Системы, которые обеспечивают поддержку во время диагностических процедур;
Системы, которые обеспечивают поддержку во время хирургических процедур.
Кроме этих приложений для больниц, существует некоторое количество вспомогательных приложений для больниц, включая роботов для взятия образцов, лабораторных исследований образцов ткани, а также других услуг, необходимых в больничной практике.
Роботы для реабилитации
Реабилитационная робототехника включает такие устройства, как протезы или например, роботизированные экзоскелеты или ортезы, которые обеспечивают тренировку, поддержку или замену утраченных активностей или нарушенной функциональностей человеческого тела и его структуры. Такие устройства могут применяться, как в больницах, так и в повседневной жизни пациентов, но как правило требуют первичной настройки медицинскими специалистами и последующего наблюдения за их правильной работой и взаимодействием с пациентом. Постоперационное восстановление, особенно в ортопедии, согласно прогнозам, будет основной сферой применения таких роботов.
Поддержка специалистов и ассистивная робототехника
Этот сегмент включает ассистивных роботов, предназначенных для использования в больницах или в домашней среде, которые разработаны для того, чтобы помогать персоналу больниц или сиделкам выполнять рутинные операции. Можно отметить существенную разницу в дизайне и внедрениях робототехнических систем, связанную с местом и условиями их использования. В контексте использования квалифицированным персоналом, будь то условия больницы или домашние условия при использовании робота для заботы о пожилом человеке, разработчики могут рассчитывать на то, что роботом управляет квалифицированный специалист. Такой робот должен соответствовать требованиям и стандартам больницы и системы здравоохранения и обладать соответствующими сертификатами. Эти роботы будет оказывать помощь персоналу соответствующих медицинских учреждений в их повседневной работе, особенно медсестрам и сиделкам. Такие робототехнические системы должны позволять сиделке проводить больше времени с пациентами, сокращая физическую нагрузку, например, робот сможет поднимать пациента для того, чтобы провести с ним необходимые рутинные операции.
2.3.2 Возможности в настоящее время и в перспективе
Робототехника для медицины - это чрезвычайно сложное направление для разработок в силу мультидисциплинарной природы и необходимости соблюдения различных жестких требований, а также из-за того, что во многих случаев медицинские робототехнические системы физически взаимодействуют с людьми, которые к тому же могут находиться в весьма уязвимом состоянии. Приведем основные возможности, существующие в выделенных нами сегментах медицины.
2.3.2.1 Больничные роботы
Это роботы для хирургии, диагностики и терапии. Рынок роботов для хирургического вмешательства велик по размерам. Робото-ассистивные возможности могут использоваться практически во всех областях - кардиологии, сосудологии, ортопедии, онкологии и неврологии.
С другой стороны, есть множество технических проблем, связанных с ограничениями на размеры, емкость, связанных с окружающей средой и небольшим числом технологий, которые доступны для немедленного использования в больничных условиях.
Кроме технологических проблем, есть и коммерческие. Например, связанные с тем, что США старается сохранять монопольное положение на этом рынке за счет объемной интеллектуальной сосбственности. Обойти эту ситуацию можно только за счет разработки принципиально нового "железа", ПО и концепций управления. Также для таких разработок требуется солидная финансовая поддержка высокозатратных, но необходимых разработок и соответствующих клинических испытаний. Типичные области, где сейчас есть возможности:
Минимально инвазивная хирургия (MIS)
Здесь можно добиться успеха за счет разработки систем, способных расширить возможности гибкости движений инструментов за пределы, обеспечиваемые анатомией рук хирурга, повысить эффективность, или дополнить системы обратной связью (например, позволяющей судить о силе нажатия), или дополнительными данными, помогающими осуществлять процедуру. Успехи рыночного внедрения могут зависеть от ценовой эффективности продукта, сокращенного времени его развертывания (подготовки к работе) и сокращения уровня дополнительного обучения, которое необходимо, чтобы научиться использованию роботизированной сситемы. Любая разработанная система должна наглядно демонстрировать "добавленную ценность" в контексте хирургии. Клинические опытные внедрения и оценки в ходе такого тестирования в клиниках являются обязательными для того, чтобы систему приняло хирургическое сообщество.
Если сравнивать с другими направлениями малоинвазивной хирургии, робото-ассистивные системы потенциально обеспечивают хирургу лучшее управление хирургическими инструментами, а также лучший обзор во время операции. От хирурга более не требуется стоять все время операции, поэтому он не устает столь же быстро, как при традиционном подходе. Тремор рук может быть почти полностью отфильтрован программным обеспечением робота, что особенно важно для применения в хирургии, имеющей дело с микромасштабами, например, хирургии глаза. В теории, хирургический робот можно использовать почти 24 часа в день, заменяя бригады хирургов, которые с ним работают.
Робототхеника может обеспечивать быстрое восстановление, сокращение травматизма и снижение негативного влияния на ткани пациента, а также снижение нобходимой радиационной дозы. Роботизированные хирургические инструменты могут разгрузить мозг врача, сократить "кривую обучения" и повысить эргономику рабочего процесса для хирурга. Способы терапии, использование которых сдерживают границы возможностей человеческого тела, также становятся возможными при переходе к использованию робототехнических технологий. Например, новое поколение гибких роботов и инструментов, позволяющих добраться до органов, глубоко скрытых в теле человека, позволяют сократить размер входного разреза в человеческом теле или обойтись естественными отверстиями в человеческом теле для выполнения хирургических операций.
В долгоросрочной перспективе, использование обучающихся систем в хирургии может сократить сложность проведения операции за счет увеличения потока полезной информации, которую хирург будет получать в ходе операции. Другие потенциальные преимущества включают возможность повышения уровня возможностей бригад парамедиков ("скорой помощи") при проведении с помощью роботов стандартных клинических экстренных процедур в полевых условиях, а также проведение теле-хирургических операций на удаленных объектах, где есть только соответствующий робот и нет квалифицированного хирурга.
Можно выделить следующие возможности:
Новые совместимые инструменты, обеспечивающие повышение уровня безопасности, при сохранении всех возможностей манипулции ими, включая негнущиеся инструменты. За счет использования новых методов управления или специальных решений (которые, например, могут встраиваться в инструмент или являться внешними по отношениюк к нему) функционирование инструметов может подстраиваться в реальном времени так, чтобы обеспечить совместимость или стабильность, когда что важнее;
Введение усовершенствованных ассистивных технологий, которые ведут и предупреждают хирурга во время операции, что позволяет говорить об упрощении решения задач хирургии и снижении числа ошибок медиков. Такая "обучающая поддержка" должна повысить "совместимость" оборудования и хирурга, что обеспечит интуитивность и отсутствие сомнений при использовании системы.
Применение подходящих уровней автономии роботов в хирургической практике вплоть до полной автономности конкретных хорошо детерминированных процедур, например: автономная аутопсия; взятие образцов крови (Veebot); биопсия; автоматизация части хирургических действий (затягивание узлов, поддержка камеры...). Повышение автономности обладает потенциалом повышения эффективности.
- "Умные" хирургические инструменты по-сути условно управляются хирургами. Эти инструменты находятся в прямом контакте с тканью и повышают уровень мастерства хирурга. Миниатюризация и упрощение хирургических инструментов в будущем, также как и доступности хирургических процедур внутри и снаружи "операционного театра" - основной путь развития таких технологий.
Обучение : Обеспечение физически точных моделей, что достигается за счет использования инструментов с тактильной обратной связью обеспечивают потенциал улучшения обучения, как на ранних стадиях обучения, так и при достижении уверенных навыков работы. Возможность симулирования широкого разнообразия условий и сложностей также могут повышать эффективность данного типа обучения. Сейчас качество тактильной обратной связи еще содержит ряд ограничений, что создает сложности в демонстрировании превосходства данного типа обучения.
Клинические образцы : Есть много областей для применения автономных систем для взятия образцов - от систем для взятия анализов крови и образцов ткани для биопсии до менее инвазивных методов аутопсии.
2.3.2.2 Робототехника для реабилитации и протезирования
Робототехника для реабилитации покрывает широкий диапазон различных форм реабилитации и может быть разделена на подсегменты. В Европе существует достаточно сильная промышленность в данном секторе и активное взаимодействие с ней ускорит технологическое развитие.
Средства реабилитации
Это средства, которые могут использоваться после травмы или после операции для тренировки и поддержки восстановления. Роль этих средств - поддержка выздоровления и ускорение восстановления, при одновременной защите пользователя и его поддержке. Такие системы могут использоваться в больничных условиях под надзором врачебного персонала или выступать самостоятельным упражнением, когда устройство управляет движениями или ограничивает движения - в зависимости от того, что требуется в данном конкретном случае. Такие системы также могут обеспечивать ценную данные о процессе восстановления и мониторить состояние более непосредственно чем даже при наблюдении за пациентом в условиях больницы.
Средства функциональной замены
Назначение такой робототехнической системы - это замена утраченной функциональности. Это может быть результатом старения или травматического ранения. Такие устройства разрабатывают с целью повышения мобильности и моторных навыков пациента. Они могут выполняться, как протезы, экзоскелеты или ортопедические устройства.
В развитых реабилитационных системах критически важно, чтобы существующие европейские производители были вовлечены в процесс в качестве известных участников рынка, а релевантные клиники и партнеры клиник были вовлечены в процесс разработки. Европа в настоящее время лидирует в мире в этой области.
Нейро-реабилитация
(Сеть COST TD1006, Европейская сеть Робототехники для Нейро-реабилитации обеспечивает платформу для обмена стандартизации определений и примеров разработок по всей Европе).
В настоящее время используется немного роботизованных устройств для нейро-реабилитации, поскольку еще не удалось обеспечить их широкого распространения. Робототехника используется для после-инсультной реабилитации в после-острой фазе и других нейро-моторных патологий, таких, как болезнь Паркинсона, множественный склероз и атаксия. Позитивные результаты с использованием роботов (не хуже или лучше, чем при использовании традиционной терапии) в реабилитационных целях начинают подтверждаться результатами исследований. В последнее время позитивные результаты также подтвержадются исследованиями в области нейро-визуализации. Было доказано, что интеграция с FES показала усиление позитивного результата (как для мышечной системы, так и периферийной и для центральной моторной). Упражнения с биологической обратной связью и игровыми интерфейсами начинают рассматриваться как решения, которые можно реализовать, но такие системы все еще находятся на ранней стадии разработки.
Для того, чтобы разрабатывать работоспособные системы необходимо решить несколько проблем. Это низкая стоимость устройств, проверенные результаты клинических испытаний, хорошо определенный процесс оценки состояния пациента. Возможности систем по корректной идентификации намерений пользователя и тем самым предотвращение травм, в настоящее время ограничивает эффективность таких систем. Управление и мехатроника, интегрированные для того, чтобы отвечать возможностям человеческого тела, включая когнитивную нагрузку, находятся на ранних стадиях развития. Должны быть достигнуты улучшения в надежности и в продолжительности рабочего времени до того, как могут быть разработаны пригодные к коммерческому использованию системы. Также целями разработки должны быть быстрое время развертывания и востребованность терапевтами.
Протезирование
Существенный прогресс может быть получен в области производства умных протезов, которые способны адаптироваться к особенностям движений пользователя и к условиям окружающей среды. Робототехника обладает потенциалом для комбинирования улучшенных способностей самообучения и повышенной гибкости и управления, особенно по части протезов верхних конечностей и кистевых протезов. Частные области исследований включают возможности адаптации к персональному, полу-автономному управлению, обеспечение искуственной чувствительности за счет обратной связи, улучшенная проверка, улучшенная энергоэффективность, self power recovery, улучшенный процессинг миоэлектрических сигналов. Смарт протезы и ортезы, управляемые активностью мышц пациента, позволят воспользоваться преимуществами таких систем обширным группам пользователей.
Системы поддержки мобильности
Пациенты с сокращением физических возможностей, временным или постоянным, могут воспользоваться преимуществами, связанными с повышением мобильности. Роботизированные системы могут обеспечивать поддержку и упражнения, необходимые для увеличения мобильности. Уже есть примеры разработок таких систем, но они находятся на ранней стадии развития.
В будущем возможно что такие системы смогут компенсировать даже когнитивные расстройства, предотвращая падения и несчастные случаи. Ограничения таких систем связаны с их стоимостью, а также с возможностью длительно носить на себе такие системы.
В ряде реабилитационных приложений, есть возможность использования натуральных интерфейсов, таких как миоэлектрика, снятие сигналов с головного мозга, а также интерфейсов, основанных на речи и жестах.
2.3.2.3 Поддержка специалистов и ассистивные роботы.
Поддержка со стороны специалистов и ассистивная робототехника могут быть разделены на ряд областей применения.
Системы поддержки заботящегося о пациенте : Поддерживающие системы, используемые лицами, заботящимися о пациентах, которые взаимодействуют с пациентами или системы, используемые пациентами. Они могут включать роботизированные системы, которые обеспечивают использование лекарственных средств, берут образцы, улучшают гигиену или процессы восстановления.
Подъем и перемещение пациента : Системы подъема и позиционирования пациента могут обладать различными возможностями от точного позиционирования во время хирургических вмешательств или сеансов лучевой терапии до содействия младшему медицинскому персоналу или лицам, заботящимся о пациенте, в подъеме человека с кровати или укладывании на нее, а также в транспортировке пациентов по больнице. Такие системы могут быть разработаны так, чтобы их можно было конфигурировать в зависимости от состояния пациента и использовать их так, чтобы у пациента была определенная степень управления их положением. Ограничения здесь могут быть связаны с необходимостью получения сертификатов безопасности и безопасного управления силами, достаточными для перемещения пациентов так, чтобы исключить возможные травмы пациентов. Энергоэффективные структуры и дизайн, выполненный с учетом необходимости экономии пространства, будут критичны для эффективных внедрений.
При разработке ассистивных робототехнических решений, важно придерживаться набора базовых принципов. Разработка должна фокусироваться на поддержке дефицита функциональности, а не на создании специфических условий. Решения должны быть практичными с точки зрения их использования и обеспечивать заметные преимущества для пользователя. Это может включать использование технологий для мотивирования пациентов делать для себя как можно больше, при одновременном сохранении безопасности. Внедрение таких систем не будет жизнеспособным и востребованным, если они не обеспечат воможности снижения нагрузки на персонал, создавая экономический кейс для внедрения, при одновременной надежности и безопасности использования.
Роботы для биомедицинских лабораторий для медицинских исследований
Роботы уже находят примнение в биомедицинских лабораториях, где они сортируют образцы и манипулируют ими в процессе проведения исследований. Приложения для создания сложных роботизированных систем расширяют возможности еще более, например, в область усовершенствованного скрининга клеток и манипуляций, связанных с клеточной терапией и избирательной сортировкой клеток.
2.3.2.4 Требования в среднесрочном периоде
Следующий список представляет "точки роста" в области медицинской робототехники
Экзоскелеты для нижней части туловища, которые подстраивают свое функционирование к индивидуальным особенностям поведения пациента и/или особенностям его анатомии, оптимизируя поддержку в зависимости от пользователя или условий окружающей среды. Системы могут адаптироваться пользователем к различным условиям и выполнению различных задач. Области применение: нейро-реабилитация и поддержка работников.
Роботы, предназначенные для автономной реабилитации (например, реабилитация в "игровом" режиме, реабилитация верхних конечностей после инсульта) должны воспринимать нужды пациента и его реакции, а также подстраивать под них терапевтическое воздействие.
Роботы, предназначенные для поддержки мобильности и возможностей пациента к манипуляции, должны поддерживать натуральные интерфейсы, гарантируя безопасность и работоспособность в условиях окружающей среды, близкой к "натуральной".
Реабилитационные роботы, разработанные для того, чтобы обеспечивать интеграцию сенсоров и двигателей, за счет обеспечения двунаправленной связи, включая мультирежимный ввод команд (миоэлектрика + инерциальная сенсорика) и мультирежимной обратной связи (электро-тактильной, вибро-тактильной и/или визуальной).
Протезы рук, запяться, кисти, которые автоматически адаптируются к пациенту, позволяя ему управлять по-отдельности любым пальцем, вращением большого пальца, кистевыми DOF-ами. Это должно сопровождаться применением множественных сенсоров и алгоритмов распознавания паттернов, чтобы обеспечить естественность управления (постоянное управление силой) за счет возможных DOFs. Области применения: восстановление функциональности руки для ампутантов.
Протезы и реабилитационные роботы, оснащенные системами полу-автоматического управления для улучшения качества функционирования и/или сокращения когнитивной нагрузки на пользователя. Системы должны позволять восприятие и интерпретацию окружения вплоть до определенного уровня, чтобы сделать возможным автономное принятие решений.
Протезы и реабилитационные роботы способные задействовать разнообразные онлайн-ресурсы (хранилища информации, процессинг) за счет использования облачных вычислений, чтобы внедрить усовершенствованную функциональность, которая находится существенно за пределами возможностей "бортовой" электроники и/или возможностей прямого управления со стороны пользователя.
Недорогие протезы и робототехнические решения, созданные с использованием аддитивных технологий или массовых производств (3D-печать и т.п)
Надомная терапия, снижающая интенсивность невропатической боли или фантомной боли верхних конечностей за счет усовершенствованной интерпретации сигналов, снимаемых с мышц, благодаря использованию роботизированных конечностей (с меньшей гибкостью, чем в предыдущих примерах) и/или "виртуальной реальности".
Биомиметрическое управление взаимодействием с роботом-хирургом.
Адекватные технологии механической актуации и сенсорики для разработки гибких миниатюрных роботов с силовой обратной связью, а также инструментов для усовершенствованной и расширенной хирургии с минимальной инвазивностью.
Системы подзарядки от окружающей среды для имплантируемых микро-роботов.
Для получения биомиметрического управления процессами реабилитации: интеграция волевых "импульсов" при движении субъекта, при поддержке FES для улучшенного повторного обучения моторике, при управлении роботом.
Разработка применимых в условиях больницы методов для восстановления двигательной активности, которая выходит за пределы парадигмы обычно используемых статичных механизмов с ручной настройкой.
На низком TRL
Автоматизированное когнитивное понимание необходимых задач в действующем окружении. Бесшовное физическое объединение человек-робот для условий "обычной" окружающей среды на базе дополнительного управляющего интерфейса. Полноценная, не требующая настроек адаптивность к пациенту. Надежность выявления намерений.
Реабилитация пациентов после травм и инсультов – это многоэтапный процесс, который происходит в течении длительного времени и включает в себя множество составляющих (эрготерапия, кинезиотерапия, курсы массажа, ЛФК, занятия с психологом, логопедом, лечение у невропатолога).
В современной медицине появляются новые методы, которые служат для восстановления функционирования головного мозга и скорейшего возвращения пациента к нормальной жизни.
Роботизированная механотерапия – новый метод реабилитации
Одним из новейших направлений восстановления двигательных функций пациента является роботизированная механотерапия. Суть её заключается в использовании специальных роботизированных конструкций для тренировки функций верхних и нижних конечностей с наличием обратной связи.
Достоинством робототерапии является достижение наилучшего качества тренировок по сравнению с традиционной лечебной физкультурой благодаря следующим факторам:
- увеличение длительности занятий;
- высокая точность циклических многократно повторяющихся движений;
- неизменяемая равномерная программа тренировок;
- наличие механизмов оценки эффективности выполняемых упражнений и возможность показать её пациенту.
1. Система для реабилитации верхних конечностей.
Такой тип устройств предназначен для восстановления функции кистей и пальцев рук в основном при инсультах и черепно-мозговых травмах, а также возможно проведение реабилитационных программ при посттравматических и послеоперационных патологиях суставов кистей рук, хронических дегенеративных и воспалительных болезней суставов кистей рук. Суть работы системы заключается в технике обратного обучения движениям верхних конечностей.
При травме или в области поражения мозговой ткани клетки погибают, и в этом участке мозга прекращается передача импульсов. Однако благодаря механизму нейропластичности мозг может адаптироваться ко многим патологическим ситуациям.
Нейропластичность – это способность здоровых нейронов, которые находятся возле очага поражения мозговой ткани, соединяться с окружающими нервными клетками и принимать на себя определенные функции, то есть при определенных условиях (например, получения стимулов с периферии) восстанавливать информационную передачу между центральной и периферической нервной системой.
Поэтому очень важным фактором является программа воздействий определенных стимулов на пораженную зону головного мозга. Такими стимулами являются многократно повторяющиеся функциональные движения, которые должны выполняться очень точно в определенном порядке.
Тренировки на роботизированных реабилитационных тренажерах могут обеспечить подобную программу стимулов. Устройство может выполнить от трехсот до пятисот высокоточных повторяющихся движений за час (по сравнению с тридцатью – сорока движениями при обычных тренировках), что создает оптимальные условия для восстановления функций руки в более короткий срок.
Курс терапии можно проходить в стационаре ежедневно, а можно и амбулаторно – тогда курс проводится почасово два-три раза в неделю.
2. Роботизированные комплексы для обучения навыку ходьбы.
Эти конструкции являются прорывом в робототехнике и предназначены для лечения патологических состояний с нарушениями функций ходьбы, координации и равновесия.
Показаниями к применению являются двигательные расстройства нижних конечностей, связанные с наличием черепно-мозговой или спинальной травмы, последствиями инсульта, паркинсонизма, рассеянного склероза и демиелинизирующих заболеваний.
Весь аппарат может включать в себя платформу для автоматической синхронизации ходьбы, систему подвеса тела пациента, автоматическую систему двигательной активности ног и компьютерную программу. Благодаря контролю и регулированию движений пациента с помощью датчиков достигается стимулирование пораженных участков головного мозга таким образом, как это происходит при естественной ходьбе. .
Использование таких систем восстановления позволяют:
- помочь пациенту встать на ноги и восстановить функцию ходьбы в наиболее короткие сроки;
- предотвратить осложнения, связанные с неподвижностью пациентов в течении длительного времени (пролежни, атрофия мышц, застойные явления в легких);
- адаптировать сердце и сосуды пациента к возвращению к физическим нагрузкам и вертикальному положению тела.
Курс терапии может длиться от пятнадцати до сорока пяти тренировок. Их количество определяется индивидуально для каждого пациента лечащим врачом после клинического обследования.
Виды роботизированных комплексов

Как свидетельствует клиническая практика, восстановление двигательной активности больных с помощью роботизированной механотерапии помогает в большинстве случаев избежать инвалидизации и вернуть пациентов к нормальной жизни.
Пройти курс роботизированной механотерапии с использованием новейших реабилитационных систем можно в медицинской клинике Эвексия . Эти революционные методы восстановления позволяют запрограммировать для каждого пациента свою персональную программу в зависимости от потребностей и возможностей больного.
Отделение роботизированных методов медицинской реабилитации является подразделением Центра медицинской реабилитации и восстановительной медицины.
В работу отделения внедрены отечественные и зарубежные технологии восстановительного лечения и реабилитации, гармонически сочетающие классические проверенные методики и современные научные достижения.
Основное направление работы отделения - восстановительное лечение и реабилитация после нарушения мозгового кровообращения, черепно-мозговых травм, поражений опорно-двигательного аппарата.
Наличие высокотехнологичного реабилитационного оборудования с биологической обратной связью позволяет оценить функциональные резервы организма и составить индивидуальную программу лечения для каждого больного.
Комплекс Biodex Systems 4 PRO - лидер в области нейромышечного тестирования и реабилитационных упражнений. Сочетание динамических и статических мышечных нагрузок, возможность проводить мобилизацию суставов в различных направлениях позволяет осуществлять полноценное восстановление утраченных двигательных функций.
Области применения: ортопедия, неврология, травматология, спортивная медицина, производственная реабилитация, геронтология.
Комплекс обеспечивает быструю и точную диагностику, лечение и документирование нарушений, являющихся причиной функциональных расстройств суставов и мышц. В комплектацию входит набор приспособлений для работы с тазобедренным, коленным, плечевым, локтевым, голеностопным и лучезапястным суставами.
Система Biodex Systems 4 дает полную свободу в выборе режимов лечения на различных клинических этапах, что позволяет индивидуально подойти к проблемам каждого пациента.

Роботизированный реабилитационный комплекс Lokomat применяется для восстановления навыков ходьбы у больных с выраженным двигательным дефицитом вследствие черепно-мозговых и спинальных травм, последствий нарушения мозгового кровообращения.
Роботизированные ортезы точно синхронизированы со скоростью беговой дорожки и задают ногам пациента траекторию движения, которая формирует ходьбу, близкую к физиологической. Дружественный компьютерный интерфейс позволяет врачу управлять аппаратом и регулировать параметры тренировки согласно возможностям и потребностям каждого пациента Интегрированная система обратной связи визуально в реальном времени иллюстрирует параметры походки.

Роботизированный ортез Armeo позволяет повысить эффективность восстановления функции верхних конечностей, нарушенных вследствие черепно-мозговой и спинальной травм, рассеянного склероза, нарушения мозгового кровообращения; после оперативного удаления опухолей головного и спинного мозга; при посттравматических нейропатиях.
Занятия на Armeo дают возможность предотвратить угрожающую потерю мышечной силы и развитие контрактуры суставов, способствуют уменьшению спастичности, улучшению координации, обучают новым движениям. Armeo позволяет пациентам с гемипарезом, используя остаточные функциональные возможности поврежденной конечности, развивать и усиливать локомоторную и хватательную функции. Компьютерная программа содержит широкий набор эффективных и увлекательных видеоигр с различными уровнями сложности. Аппарат оснащен функцией биологической обратной связи.

THERA-VITAL - тренажер для реабилитации верхних и нижних конечностей в активно-пассивном режиме. Применяется:
- в неврологии (инсульт, ЧМТ, спинальная травма, болезнь Паркинсона, ДЦП);
- травматологии-ортопедии (состояние после длительной иммобилизации, после эндопротезирования);
- в кардиологической реабилитации;
- геронтологии (снижение дефицита движений у лиц пожилого и старческого возраста);
- для снижения последствий дефицита двигательной активности (отеки, контрактуры суставов);
- в целях профилактики осложнений у пациентов разных возрастов со сниженной двигательной активностью.

Реабилитационный тренажер Kinetec Centura используется для постоянной пассивной разработки плечевого сустава в целях профилактики суставной тугоподвижности, контрактуры мягких тканей и мышечной атрофии.
С применением тренажера предотвращается окоченение плечевого сустава, ускоряется процесс послеоперационного восстановления диапазона движений, улучшается качество суставной поверхности, уменьшается боль и отечность.
Показания к применению: операция на манжете мышц-вращателей, полная замена плечевого сустава, "замороженное плечо", переломы и вывихи, требующие реконструктивной операции на ключице, лопатке, артротомия, акромиопластика, ожоги, реабилитация после мастэктомии.

BTE TECHNOLOGIES (TECH TRAINER , PRIMUS RS ) - универсальные комплексы для функциональной оценки, диагностики и реабилитации опорно-двигательного аппарата. Включают большое количество адаптеров и насадок для симуляции различных профессиональных и повседневных действий (как изолированные, так и комплексные движения). Позволяют проводить тренировки во всех двигательных плоскостях. Благодаря сенсорному монитору и дружественному интерфейсу программного обеспечения значительно облегчаются тестирование и тренировки. Данные тестов и тренировок сохраняются и документируются.
Области применения: производственная и спортивная реабилитация, ортопедия, нейрореабилитация, тестирование силы.

Бесконтактный гидромассаж на аппаратах « Medistream », « Medy Jet »
Гидромассаж уже более 20 лет рекомендуется докторами и профессиональными спортсменами для облечения и снятия болей. Мощные волны теплой воды охватывают все тело, даря телу глубокий расслабляющий и восстанавливающий массаж. Процедура бесконтактного гидромассажа облегчает боль, снимает мышечное напряжение, улучшает кровообращение в массируемой области, снимает стресс и тревожность.

Альфа-капсула — это воздействие механолечебных, термолечебных и фотолечебных факторов: общая вибротерапия, системная и локальная термотерапия, импульсная фотостимуляция и селективная хромотерапия, аудиорелаксация, ароматерапия, аэроинотерапия. Альфа-массаж, проводимый в капсуле, улучшает настроение пациентов, снижает внутреннюю напряженность, значимо увеличивает прирост толерантности к физической нагрузке и стабилизирует вегетативный статус.
Показания для проведения процедур в Альфа-капсуле: избыточный вес; локальные жировые отложения; целлюлит; снижение тургора и тонуса кожи; очищение и детоксикация тела, эмоциональное напряжение, расстройства сна; неврозы; хроническая усталость; гипертоническая болезнь; головные боли; пониженный иммунитет; реабилитация после спортивных травм; последствия длительных перенесенных заболеваний.

Аппарат для пневмокомпрессии нижних конечностей PULSTAR s 2
В настоящее время пневмокомпрессия является основным методом, применяемым с целью профилактики и лечения различных хронических сосудистых заболеваний конечностей.
Пневматическая компрессия представляет собой метод активной функциональной терапии, где в качестве лечебного фактора используется дозированная физическая нагрузка - сдавливание конечностей. Процедуры пневмомассажа способствуют улучшению периферического кровообращения, ускорению тока крови, развитию коллатерального русла, уменьшению спазма сосудов, улучшению трофики тканей.
Показания к применению: местные отечные синдромы при венозной недостаточности и лимфостазе; облитерирующие заболевания нижних конечностей; снятие утомления и восстановление работоспособности после длительных физических нагрузок, вынужденной гиподинамии; в целях профилактики сосудистых заболеваний конечностей у лиц, которые длительное время по роду своей деятельности находятся на ногах; при постмастэктомических отёках верхних конечностей.

Многофункциональная кровать-массажер Nuga Best сочетает в себе различные методы оздоровления: рефлексотерапевтическое воздействие, мануальную терапию, физиотерапию, низкочастотную миостимуляцию.
Сочетание в одном изделии различных методик воздействия на организм позволяет проводить мероприятия эффективной профилактики и оздоровления по широкому спектру заболеваний:
- опорно-двигательного аппарата (заболевания позвоночника);
- трофических расстройств нейрогенного и сосудистого происхождения;
- периферической нервной системы (радикулиты);
- ситуационных стрессовых ситуаций (нервного переутомления);
- синдромом хронической усталости и физического переутомления;
- коррекция осанки в подростковом и юношеском возрасте;
- в гинекологии и урологии.
Вторая половина ХХ века стала временем интенсивного развития всех областей науки, техники, электроники и роботостроения. Медицина стала одним из главных векторов внедрения роботов и искусственного интеллекта. Главной целью развития медицинской робототехники является высокая точность и качество обслуживания, повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. Поэтому в этой статье мы рассмотрим новые методы лечения, а также использование роботов и автоматизированных систем в различных областях медицины.
Еще в середине 70-х годов в больнице городе Фэрфакс, США, штат Виржиния, появился первый медицинский мобильный робот ASM, который перевозил контейнеры с подносами для питания больных. В 1985 году впервые мир увидел роботизированную хирургическую систему PUMA 650, разработанную специально для нейрохирургии. Чуть позже хирурги получили новый манипулятор PROBOT, а в 1992 году появилась система RoboDoc, применявшаяся в ортопедии при протезировании суставов. Через год компания Computer Motion Inc. представила автоматическую руку Aesop для удержания и изменения положения видеокамеры при лапароскопических операциях. А в 1998 году этот же производитель создал более совершенную систему ZEUS. Обе эти системы не являлись полностью автономными, их задачей было ассистирование врачам при операции. В конце 90х годов компания-разработчик Intuitive Surgical Inc создала универсальную роботизированную хирургическую систему с дистанционным управлением – Da Vinci, которая с каждым годом совершенствуется и внедряется во многие медицинские центры мира до сих пор.
Классификация медицинских роботов:
В настоящее время роботы играют колоссальную роль в развитии современной медицины. Они способствуют точной работе при операциях, помогают провести диагностику и поставить правильный диагноз. Заменяют отсутствующие конечности и органы, восстанавливают и улучшают физические возможности человека, снижают время на госпитализацию, обеспечивают удобство, быстроту реагирования и комфорт, экономят финансовые затраты на обслуживание.
Существует несколько видов медицинских роботов, отличающихся своими функциональными возможностями и конструкцией, а также сферой применения для различных областей медицины:
Роботы-хирурги и роботизированные хирургические системы - применяются для проведения сложных хирургических операций. Являются не автономными устройствами, а дистанционно управляемым инструментом, который обеспечивает врача точностью, повышенной сноровкой и управляемостью, дополнительной механической силой, уменьшает утомляемость хирурга, снижает риск заболевания хирургической бригады гепатитом, ВИЧ и другими заболеваниями.
Роботы-симуляторы пациентов - предназначены для отработки навыков принятия решений и практических врачебных интервенций в лечении патологий. Такие устройства полностью воспроизводят физиологию человека, моделирует клинические сценарии, реагируют на введение препаратов, анализируют действия обучаемых и соответствующим образом реагируют на клинические воздействия.
Экзоскелеты и роботизированные протезы - экзоскелеты способствуют повышению физической силы и помогают при восстановительном процессе опорно-двигательного аппарата. Роботизированные протезы - импланты, которые заменяют отсутствующие конечности, состоят из механико-электрических элементов, микроконтроллеров с искусственным интеллектом, а также способны управляться от нервных окончаний человека.
Роботы для медицинских учреждений и роботы-помощники - являются альтернативой санитарам, медсестрам и медбратам, сиделкам, няням и другому медицинскому персоналу, способны обеспечивать уход и внимание пациенту, помогать в реабилитации, обеспечивать постоянную связь с лечащим врачом, транспортировать больного.
Нанороботы - микророботы, действующие в организме человека на молекулярном уровне. Разрабатываются для диагностики и лечения раковых заболеваний, проведения исследований кровеносных сосудов и восстановления поврежденных клеток, могут анализировать структуру ДНК, проводить ее корректировку, уничтожать бактерии и вирусы и т.д.
Другие специализированные медицинские роботы - существует огромное количество роботов, помогающие в том или ином процессе лечения человека. Например, устройства, которые способны автоматически перемещаться, дезинфицировать и кварцевать больничные помещения, замерять пульс, брать кровь на анализ, производить и выдавать медикаменты и др.
Рассмотрим подробнее каждый вид роботов на примерах современных автоматизированных устройств, разрабатываемых и внедренных во многих сферах медицины.
Роботы-хирурги и роботизированные хирургические системы:
Самым известным роботом-хирургом во всем мире является аппарат "Da Vinci". Устройство, произведенное компанией Intuitive Surgical, весит полтонны и состоит из двух блоков, один - блок управления, предназначен для оператора, а второй - четырёхрукий автомат, который выполняет роль хирурга. Манипулятор с искусственными запястьями имеет семь степеней свободы, аналогично с рукой человека, и 3D визуализационную систему, которая выводит трехмерное изображение на монитор. Такая конструкция повышает точность движений хирурга, исключает тремор рук, неловкие движения, уменьшает длину разрезов и кровопотерю во время операции.
Робот хирург Da Vinci
С помощью робота возможно провести огромное количество различных операций таких, как восстановление митрального клапана, реваскуляризация миокарда, абляция тканей сердца, установка эпикардиального электронного стимулятора сердца для бивентрикулярной ресинхронизации, операции на щитовидной железе , желудочное шунтирование, фундопликация по Nissen, гистерэктомия и миомэктомия, операции на позвоночнике, замена дисков, тимэктомия - операция по удалению вилочковой железы, лобэктомия легкого, операции в урологии , эзофагоэктомия, резекция опухоли средостения, радикальная простатэктомия, пиелопластика, удаление мочевого пузыря, перевязка и развязка маточных труб , радикальная нефрэктомия и резекция почки, реимплантация мочеточника и другие.
В настоящее время развернулась борьба за рынок медицинских роботов и автоматизированных хирургических систем. Ученые и компании-производители медицинского оборудования стремятся внедрить свои устройства, поэтому с каждым годом появляется все больше роботизированных аппаратов.
Конкурентами "Da Vinci" стали новый робот-хирург MiroSurge , предназначенный для операций на сердце, роботизированная рука от компании UPM для точной вставки игл, катетеров и других хирургических инструментов в процедурах минимально инвазивной хирургии, хирургическая платформа под названием IGAR от компании CSII , роботизированная система-катетер Sensei X , производства Hansen Medical Inc для проведения сложных операций на сердце, система для трансплантации волос ARTAS от Restoration Robotics , хирургическая система Mazor Renaissance , которая помогает производить операции на позвоночнике и головном мозге, робот-хирург от ученых из SSSA Biorobotics Institute , а также робот-помощник для отслеживания хирургических инструментов от GE Global Research , находящийся в стадии разработки, и многие другие. Роботизированные хирургические системы служат ассистентами или помощниками для врачей и не являются полностью автономными устройствами.

Робот хирург MiroSurge

Робот хирург от UPM

Робот хирург IGAR

Робот катетер Sensei X

Роботизированная система по трансплантации волос ARTAS

Робот хирург Mazor Renaissance

Робот хирург от SSSA Biorobotics Institute

Робот для отслеживания хирургических инструментов от GE Global Research
Роботы-симуляторы пациентов:
Для отработки практических навыков будущих врачей существуют специальные роботы-манекены, которые воспроизводят функциональные особенности сердечно–сосудистой, дыхательной, выделительной систем, а также непроизвольно реагируют на различные действия обучающихся, например, при введении фармакологических препаратов. Самый популярный робот-симулятор пациента – HPS (Human Patient Simulator) от американской компании METI. К нему можно подключить прикроватный монитор и отслеживать показатели кровяного давления, минутного сердечного выброса, ЭКГ и температуры тела. Устройство способно потреблять кислород и выделять углекислый газ, как при настоящем дыхании. В режиме анестезии возможно поглощение или выделение закиси азота. Такая функция обеспечивает отработку навыков по искусственной вентиляции легких. Зрачки в глазах робота способны реагировать на свет, а подвижные веки закрываются или открываются в зависимости от того, находится ли пациент в сознании. На сонных, плечевых, бедренных, лучевых подколенных артериях прощупывается пульс, который меняется автоматически и зависит от артериального давления.
Симулятор HPS имеет 30 профилей пациентов с различными физиологическими данными, имитируя здорового мужнину, беременную женщину, пожилого человека и т.д. В процессе обучения моделируется определенный клинический сценарий, в котором описывается место действия и состояние пациента, цели, необходимое оборудование и медикаменты. Робот имеет фармакологическую библиотеку, состоящую из 50 препаратов, включая газообразные анестетики и внутривенные препараты. Управление манекеном производится с помощью беспроводного компьютера, позволяя инструктору контролировать все аспекты процесса обучения непосредственно рядом со студентом.
Следует отметить большую популярность манекенов-симуляторов рожениц, например, GD/F55. Он разработан для обучения медицинского персонала в отделениях акушерства и гинекологии, позволяет отработать практические навыки и умения в гинекологии, акушерстве, неонтологии, педиатрии, интенсивной терапии и сестринском уходе в родильном отделении. Робот Simroid имитирует пациента в кресле стоматолога, его ротовая полость в точности повторяет человеческую. Устройство способно симулировать звуки и стон, которые создает человек, если ему больно. Существуют роботы-тренажеры для обучения манипуляционной технике. Это, по сути, муляж человека с имитаторами вен и сосудов, выполненных из эластичных трубок. На таком устройстве студенты отрабатывают навыки венесекции, катетеризации, венепункции.
Экзоскелеты и роботизированные протезы:
Один из самых известных медицинских устройств является роботизированный костюм - экзоскелет. Он помогает людям с ограниченными физическими возможностями перемещать свои тела. В момент, когда человек пытается пошевелить руками или ногами, специальные датчики на коже считывают небольшие изменения в электрических сигналах организма, приводя в рабочее состояние механические элементы экзоскелета. Одними из популярных устройств стали Walking Assist Device (вспомогательное устройство для ходьбы) от японской компании Honda , реабилитационный экзоскелет HAL от компании Cyberdyne , широко применяемый в японских больницах, аппарат Parker Hannifin университета Вандербильта (Vanderbilt University) , дающий возможность двигать суставами бедер и колен, мощный экзоскелет NASA Х1 , разработанный для космонавтов и парализованных людей, экзоскелет Kickstart от Cadence Biomedical , работающий не от батареи, а использующий кинетическую энергию, генерируемую человеком при ходьбе, экзоскелеты eLEGS, Esko Rex, HULC от производителя Ekso Bionics , ReWalk от компании ARGO , Mindwalker от компании Space Applications Services , помогающие парализованным людям, а также уникальный мозг-машинный интерфейс (BMI) или просто экзоскелет для мозга MAHI-EXO II для восстановления двигательных функций методом считывания мозговых волн.
Широкое применение экзоскелетов помогает многим людям во всем мире почувствовать себя полноценными. Даже полностью парализованные люди уже сегодня имеют возможность ходить. Ярким примером служат роботизированные ноги физика Амита Гоффера , которые управляются с помощью специальных костылей и могут автоматически определять, когда нужно сделать шаг, распознавать речевые сигналы "вперед", "сидеть", "стоять".

Экзоскелет для ходьбы Walking Assist

Экзоскелет HAL от Cyberdyne

Экзоскелет Parker Hannifin

Экзоскелет NASA Х1

Экзоскелет Kickstart от Cadence Biomedical

Экзоскелет HULC от Ekso Bionics

Экзоскелет ReWalk от ARGO

Экзоскелет Mindwalker от Space Applications Services 
Экзоскелет для мозга MAHI-EXO II

Экзоскелет от Амит Гоффера
Но что же делать, когда конечности отсутствуют? Это касается в основном ветеранов войны, а также жертв случайных обстоятельств. В связи с этим такие компании, как компания Quantum International Corp (QUAN) и их экзопротезы и Defense Advanced Research Projects Agency (DARPA) совместно с Департаментом помощи ветеранам, Центром реабилитации и Службой развития США вкладывают огромные средства в исследование и разработку роботизированных протезов (бионических рук или ног), которые обладают искусственным интеллектом, способные чувствовать окружающую среду и распознавать намерения пользователя. Эти устройства с точностью имитируют поведение природных конечностей, а также управляются с помощью собственного мозга (микроэлектроды, имплантированные в мозг, или датчики считывают нейросигналы и передают их в виде электрических сигналов в микроконтроллер). Обладатель самой популярной бионической руки стоимостью в 15000 долларов США - британец Найджел Экланд, который ездит по миру и пропагандирует использование искусственных роботизированных протезов.
Одним из важных научных разработок стали искусственные роботизированные лодыжки iWalk BiOM , разработанные профессором Массачусетского технологического института Хью Херром (Hugh Herr) и его группой биомехатроники в лаборатории MIT Media Lab. iWalk получает финансирование от американского Департамента по делам ветеранов и Министерства обороны, и поэтому многие инвалиды-ветераны, служившие в Ираке и Афганистане, уже получили свои бионические лодыжки.

Роботизированные лодыжки iWalk BiOM
Ученые со всего мира стремятся не только улучшить функциональные особенности роботизированных протезов, а придать им реалистичный вид. Американские исследователи во главе с Женан Бао (Zhenan Bao) из Стэнфордского университета (Stanford University) в Калифорнии, создали нанокожу для медицинских протезных устройств . Это полимерный материал обладает высокой гибкостью, прочностью, электропроводностью и чувствительностью к давлению (считывание сигналов по типу сенсорных панелей).

Нанокожа из Stanford University
Роботы для медицинских учреждений и роботы-помощники:
Больница будущего - больница с минимальным человеческим персоналом. С каждым днем в медицинские учреждение все больше внедряются роботы-медсестры, роботы-медбратья и роботы телеприсутствия для контакта с лечащим врачом. Например, в Японии уже давно работают роботы-санитары от Panasonic , роботы-помощники Human Support Robot (HSR) от компании Toyota , ирландский робот-медбрат RP7 от разработчика InTouch Health, корейский робот KIRO-M5 и многие другие. Такие устройства представляют собой платформу на колесах и способны измерять пульс, температуру, контролировать время приема пищи и медикаментов, своевременно оповещать о проблемных ситуациях и необходимых действиях, поддерживать связь с живым медицинским персоналом, собирать разбросанные или упавшие вещи и т.д.

Роботы-санитары от Panasonic

Робот-помощник HSR от Toyota

Робот медбрат RP7 от InTouch Health

Робот-медсестра KIRO-M5
Зачастую, в условиях непрерывного медицинского обслуживания, врачи физически не могут уделить достаточно внимания пациентам, особенно если они находятся на большом расстоянии друг от друга. Разработчики роботизированной медицинской техники постарались и создали роботов-телеприсутствия (например, LifeBot 5 , или RP-VITA от компании iRobot и InTouch Health). Автоматизированные системы позволяют передавать аудио и видео сигнал через сети 4G, 3G, LTE, WiMAX, Wi-Fi, спутниковую или радиосвязь, измерять сердцебиение пациента, кровяное давление и температуру тела. Некоторые устройства могут выполнять электрокардиографию и УЗИ, имеют электронный стетоскоп и отоскоп, перемещаются в больничных коридорах и палатах, огибая препятствия. Такие медицинские помощники обеспечивают своевременный уход и обрабатывают клинические данные в режиме реального времени.

Робот телепристутсвия LifeBot 5

Робот телепристутсвия RP-VITA
Для безопасной транспортировки образцов, лекарств, оборудования и расходных материалов в больницах, лабораториях и аптеках с большим успехом используются роботы-курьеры. Помощники имеют современную навигационную систему и бортовые датчики, позволяющие с легкостью передвигаться в помещениях со сложной планировкой. К яркими представителям подобных устройств можно отнести американские RoboCouriers от компании Adept Technology и Aethon из Медицинскомго центра University of Maryland , японские Hospi-R от Panasonic и Terapio от компании Adtex .

Робот курьер RoboCouriers от Adept Technology

Робот курьер Aethon

Робот курьер Hospi-R от Panasonic

Робот курьер Terapio от Adtex
Отдельным направлением развития роботизированной медицинской техники является создание колясок-трансформеров, автоматизированных кроватей и специальных транспортных средств для инвалидов. Вспомним о таких разработках, как кресло с резиновыми гусеницами Unimo от японской компании Nano-Optonics , (Chiba Institute of Technology) под руководством доцента Шуро Накаджима (Shuro Nakajima), использующая ноги-колеса для преодоления лестниц или канав, робоколяска Tek Robotic Mobilisation Device от компании Action Trackchair. Компания Panasonic готова решить проблему переноса больного с кресла на кровать, требующую больших физических усилий медицинского персонала. Это устройство самостоятельно превращается из кровати в кресло и наоборот, когда это необходимо. Компания Murata Manufacturing Co объединилась с Kowa, что бы сделать инновационное медицинское транспортное средство Electric Walking Assist Car , представляющее собой автономный велосипед с маятниковой системой управления и гироскопом. Эта разработка в основном предназначена для престарелых и людей, которые имеют проблемы с ходьбой. Отдельно отметим серию японских роботов RoboHelper от Muscle Actuator Motor Company , которые являются незаменимыми помощниками медсестрам по уходу за лежачими пациентами. Аппараты способны поднять человека с кровати в сидячее положение или забрать физические отходы лежачего человека, исключая использование горшков и уток.
Нанороботы:
Нанороботы или наноботы - роботы размером с молекулу (менее 10 нм), способные двигаться, считывать и обрабатывать информацию, а также программироваться и выполнять определенные задачи. Это совершенно новое направление в развитии робототехники. Сферы использования таких устройств: ранняя диагностика рака и целенаправленная доставка лекарств в раковые клетки, биомедицинский инструментарий, хирургия, фармакокинетика, мониторинг больных диабетом, производство посредством молекулярной сборки нанороботами устройства из отдельных молекул по его чертежам, военное применение в качестве средств наблюдения и шпионажа, а также в качестве оружия, космические исследования и разработки и др.
На данный момент известны разработки медицинских микроскопических роботов для выявления и лечения рака от южнокорейских ученых , биороботы от ученых из университета штата Иллинойс , которые могут перемещаться в вязких жидкостях и биологических средах самостоятельно, прототип морской миноги - наноробот Cyberplasm , который будет передвигаться в организме человека, выявляя заболевания на ранней стадии, нанороботы инженера Адо Пуна , которые могут путешевствовать по кровеносной системе, доставлять лекарства, брать анализы и удалять сгустки крови, магнитный наноробот Spermbot - разработка ученого Oliver Schmidt и его коллег из Института интегративной нанонаук в Дрездене (Германия) для достаки спермы и лекарств, наноботы для замены белков в организме от ученых из Венского университета (University of Vienna) совместно с исследователями из Университета природных ресурсов и наук о жизни Вены (University of Natural Resources and Life Sciences Vienna).


Микророботы Cyberplasm

Нанороботы Адо Пуна

Магнитный наноробот Spermbot

Нанороботы для замены белков
Другие специализированные медицинские роботы:
Существует огромное количество специализированных роботов, выполняющих отдельные задачи, без которых невозможно представить себе эффективное и качественное лечение. Одними из таких устройств являются роботизированный кварцевый аппарат Xenex и робот-дезинфектор TRU-D SmartUVC от Philips Healthcare . Несомненно, такие аппараты просто незаменимые помощники в борьбе с внутрибольничными инфекциями и вирусами, которые служат одной из самых серьезных проблем в медицинских учреждениях.

Роботизированный кварцевый аппарат Xenex

Робот-дезинфектор TRU-D SmartUVC от Philips Healthcare
Сбор анализа крови - наиболее распространенная медицинская процедура. Качество при выполнении процедуры зависит от квалификации и физического состояния медицинского работника. Зачастую попытка взять кровь с первого раза заканчивается неудачей. Поэтому для решения этой проблемы был разработан робот Veebot , имеющий компьютерное зрение, с помощью которого он определяет местоположение вены и аккуратно направляет туда иглу.

Робот для забора крови Veebot
Робот для изучения рвотного процесса Vomiting Larry позволяет исследовать норовирусы, приводящие к 21 миллиону заболеваний, включающие симптомы тошноты, водянистой диареи, боли в животе, потери вкуса, общей вялости, слабости, боли в мышцах, головнуюой боли, кашля, субфебрильной температуры, и, конечно, сильной рвоты.

Робот для изучения рвотного процесса Vomiting Larry
Самым популярным роботом для детей остается PARO - пушистая детская игрушка в виде гренландского тюленя. Терапевтический робот может шевелить головой и лапами, распознавать голос, интонацию, прикосновения, измерять температуру и освещенность в комнате. Его конкурентом является огромный обнимающийся плюшевый робот-медведь HugBot , который замеряет пульс и кровяное давление.

Терапевтический робот PARO

Робот-медведь HugBot
Отдельная ветка медицины, занимающаяся диагностикой, лечением болезней, травм и расстройств у животных - это ветеринария. Для обучения квалифицированных специалистов в этой области Колледж ветеринарной медицины в разработке роботов-домашних животных создает уникальных роботов-тренажеров в виде собак и кошек . Для приближения к точной модели поведения животного программное обеспечение разрабатывается отдельно в Центре перспективных вычислительных систем при Корнельском университете (САС).

Роботы-тренажеры в виде собак и кошек
Эффективность роботов в медицине:
Очевидно, что применение роботов в медицине носит ряд преимуществ перед традиционным лечением с участием человеческого фактора. Использование механических рук в хирургии предотвращает многие осложнения и ошибки при операциях, сокращают послеоперационный восстановительный период, уменьшают риск заражения и инфицирования больного и персонала, исключают большую потерю крови, снижают болевые ощущения, способствуют лучшему косметическому эффекту (небольшие рубцы и шрамы). Роботизированные медицинские помощники и реабилитационные роботы позволяют уделить пристальное внимание к пациенту во время лечения, контролировать процесс выздоровления, ограничить живой персонал от трудоемкой и неприятной работы, позволить больному чувствовать себя полноценным человеком. Инновационные методы лечения и оборудование с каждым днем приближают нас к более здоровой, безопасной и долгой жизни.
С каждым годом мировой рынок медицинских роботов пополняется новыми устройствами и, несомненно, растет. По данным исследовательской компании Research and Markets, к 2020 году рынок только одних реабилитационных роботов, биопротезов и экзоскелетов вырастит до 1,8 млрд. долларов США. Главным бумом медицинских роботов ожидается после принятия единого стандарта ISO 13482 , который станет сводом правил для элементов конструкции, материалов и программного обеспечения, применяемого в устройствах.
Заключение:
Без сомнения можно сказать, что медицинские роботы- это будущее медицины. Применение автоматизированных систем значительно сокращает врачебные ошибки, уменьшает дефицит медицинского персонала. Наноробототехника помогает преодолеть тяжелые заболевания и предотвратить осложнения на ранней стадии, широко применять эффективные нанолекарства. В течении ближайших 10-15 лет медицина ступит на новый уровень с использованием роботизированного обслуживания. К сожалению, Украина находится в плачевном состоянии в отношении этой отрасли развития. К примеру, в России в Екатеринбурге знаменитый робот-хирург "Da Vinci" провел свою первую операцию еще в 2007 году. А в 2012 году президент Дмитрий Анатольевич Медведев поручил Минздраву России вместе с Минпромторгом проработать вопрос по развитию новых медицинских технологий с применением робототехники. Эту инициативу поддержала Российская академия наук. Реалия такова, что при отсутствии реальной поддержки власти Украины в развитии области медицинской робототехники, наше государство с каждым годом отстает от других цивилизованных стран. Отсюда следует показатель уровня развития страны в целом, ведь забота о здоровье и жизни гражданина, упомянутая в главном законе - Конституции Украины, является "наивысшей социальной ценностью".